About:
Exploring new approaches to machine hosted
neural-network simulation, and the science
behind them.
Your moderator:
John Repici
A programmer who is obsessed with giving experimenters
a better environment for developing biologically-guided
neural network designs. Author of
an introductory book on the subject titled:
"Netlab Loligo: New Approaches to Neural Network
Simulation". BOOK REVIEWERS ARE NEEDED!
Can you help?
There are many easy-to-guess advantages to moving consciousness to a machine platform. If/when "we" as a society become machine-based beings:
We will be able to move from one body to another with the same ease we biology-based beings now change vehicles.
We will be able to live and work in the vacuum of space without having to take along a very-hard-to-maintain bubble of pressurized air.
We will be able to travel on a beam of electro-magnetic energy to far-away worlds where spare bodies have been shipped.
And those faraway worlds will not need to have a biosphere, or have bubbles of biosphere constructed/cultivated.
In like fashion, we will be able to move to and from orbits and Lagrange points where bodies have been previously placed.
Our sustenance will not be limited to carbohydrates that require a biosphere in which to grow. Most sources will be harvestable directly from light, heat, and kinetics, which all exist in the vacuum of space.
While this is not by any means a complete list, there are likely to be many less obvious advantages, too. This one for example:
We will be able to have multiple independent bodies, each with its own short-term situational memories, working off of a single set of long-term experiential memories that have been accumulated over time.
Consider multiple bodies working in a manufacturing environment, each working off of a single experienced individual's learning and acquired expertise in manufacturing processes. Each maintaining its own short-term memories which will form and decay quickly to respond to the fine-grained details of its immediate individual situation
It may even be possible that the single individual's long-term experiential memory may be able to continue to gain learning from each body's short-term situational connections as they form and decay in response to their own current situations.
This entry explores a cross-section of excerpts from the book. The cross-section, in this case is: the need for neural networks to interact with a complex external environment.
Chapter 3, Machine Based Consciousness
"Milieu, An External Environment:
Last but certainly not least: the population of similar cells simply could not learn, or exhibit any of the behaviors described, if they had no external environment with which to interact. This clearly axiomatic observation is so taken for granted in studies of biological organisms, that it is often overlooked when modeling them."
Chapter 5, Learning
"On the other hand, consider the abstract concept of pure unsupervised learning. In a practical sense, this isn't really possible or doable either. If you place a learner directly into an isolation tank at birth, it will not learn. "
Chapter 6, Neural Network Structure
"...Of course, when the system is adaptive, and the external environment sits directly in the feedback path [diagram], this relationship can be stated in the opposite direction as well. That is to say, it is simultaneously about making output signals more consistent for each given set of input stimuli. Essentially, if we take both directions into account, it is the world changing the network, changing the world, changing the network, ... ad infinitum."
. . .
"To summarize, feedback loops of signals originating in the brain and returning can remain inside the brain, go outside the brain but remain inside the organism, or include complex chains of causal activities completely outside of the organism."
Chapter 9, What Now (Robots)
"We have seen that we can not expect a biological learning entity to learn anything, if we simply place it directly into an isolation tank at birth. We shouldn't expect anything that we build to exhibit sentient behaviors either, if we don't give it the ability to be an integral, interacting part of the complex world around it. Without such interactive capabilities, anything we build will have a restriction that is functionally identical to a biological organism in an isolation-tank. Even if all other facilities to support consciousness are in place, it will not be capable of using them, if denied the ability to interact with a complex milieu."
The Book
Netlab Loligo - New Approaches to Neural Network Simulation —
This is the book. If you have an interest in machine hosted neural network simulations and have been looking for something that radically departs from the current list of formulaic, paint-by-numbers approaches, this book may be just what you've been looking for. It is in stock and shipping now, if you would like to check it out now, prior to the press-release being distributed. It is also available from Amazon.com
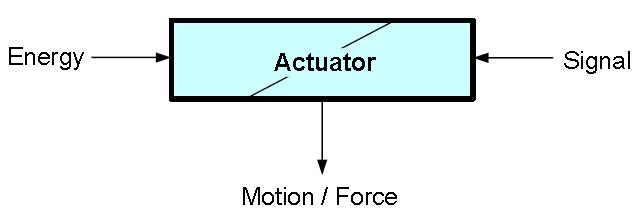
It's always about the actuators these days, isn't it? In the broadest sense, actuators are anything that can convert a signal into a physical motion or force. In a more practical sense, actuators are the “muscles” used to provide controlled motion to robotic systems. Robots and adaptive systems are able to manipulate physical objects around them by controlling the motion of actuators in specific ways. Likewise, they use actuators to manipulate themselves, as objects, relative to the objects around them.
This article explores the subject of actuators at a very introductory level. It is written by a programmer, who is trying to learn some of the details about what the robotics folk are up to, in order to organize those details into a more coherent understanding.
Demonstrates some basic capabilities of air muscles.
See the video below...
This entry is mainly just to show how people are beginning to accept unconventional actuator-capabilities.
I doubt this is cutting edge. It certainly doesn't help their credibility that they are claiming to have developed these air-muscles, which have been around now for decades. I make allowances because (1.) The person manning the trade-show booth is probably just a guy from the sales and marketing department and isn't one of the engineers, and (2.) There are likely to be some language issues, in that he may have simply meant that they had developed their technology in support of (i.e., "around") air muscles.
Recent use of air muscles is one example of how the design-priorities surrounding actuator-technology are changed in systems capable of implementing complex feedback. Though air-muscles have been around a long time, they have been obscured. Their lack of positional precision, and repeatability have made them useless for inclusion in conventional systems. While accurate, repeatable positioning are important in conventional "dead reckoning" systems, they become much less important when systems are able to get feedback on, and adapt to, positional variation.
 Stand Out Publishing
Stand Out Publishing